
Conception d'une imprimante 3D (partie 1)
Il y a quelques années de cela, je me suis procuré une imprimante 3D, une petite prusa. Si à l'époque j'ai choisi cette imprimante c'est pour deux raisons. La première : elle est open-source, la seconde : elle est a assembler soit-même. Je tenais à ce second point car je voulais connaître la mécanique et les différentes pièces qui compose une imprimante 3D. Je n'ai pas été déçu, la notice de montage fait un peu plus de 80 pages ! Mais ça m'a permis de comprendre pas mal de choses et après plusieurs années d'utilisation de saisir les points réellement important dans ce type de machine.
Elle est toujours fonctionnelle, je l'ai amélioré en lui ajoutant un LASER pour lui permettre de graver sur du bois, mais le principal point faible de cette imprimante est sa taille. Seulement 20cm x 20cm, aujourd'hui il est temps de palier à ce problème !
Choix du châssis
Le châssis d'une imprimante 3D est particulièrment important, car si il n'est pas assez rigide il risque de se déformer à cause des vibrations, ce qui fera nécessairement perdre en précision. J'ai eu la chance de mettre la main sur une armoire électrique industrielle. Quel rapport avec une imprimante 3D me direz vous ? Cette armoire a le bon goût d'être grande, rigide, mais aussi d'avoir des fixation sur toute la hauteur :
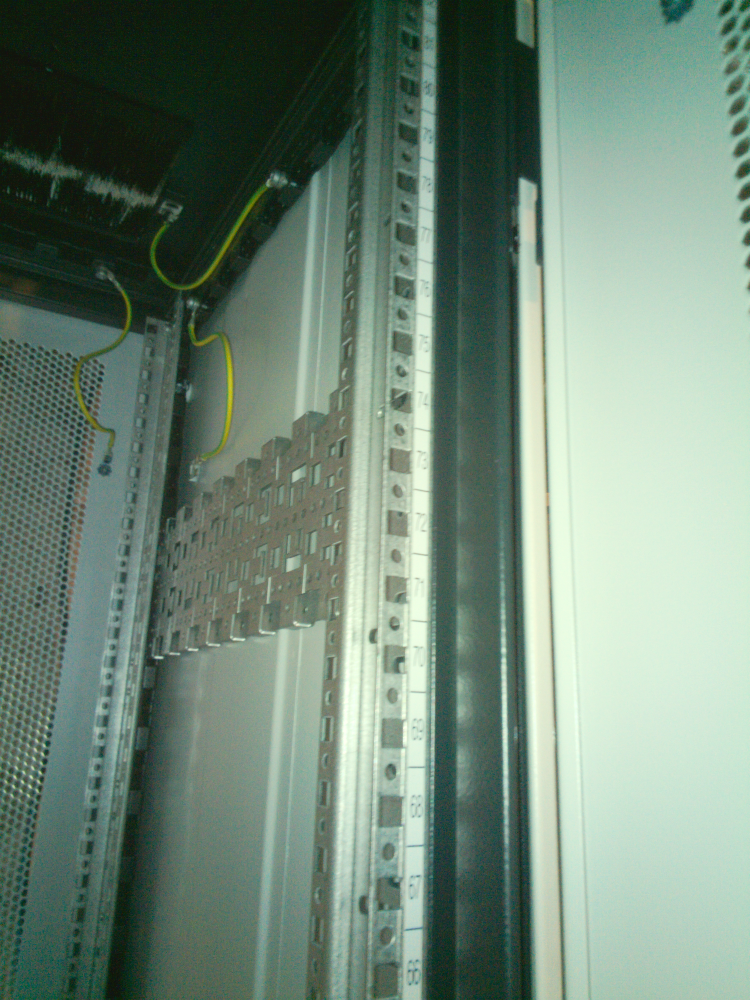
Et vu la hauteur de l'armoire (2,20m), je vais pouvoir y placer plusieurs imprimantes 3D !
Choix de la mécanique
Il existe plusieurs type de mécanique pour réaliser les mouvements pour une imprimante 3D, cartésien, delta, core XY. C'est ce dernier qui me tente beaucoup. Contrairement au cartésien, il a l'avantage de pouvoir garder le plateau fixe sans pour autant déplacer un moteur sur l'un des axe. Dans un core XY, les moteurs restent fixe et vu que les deux moteurs sont reliés au chariot, potentiellement chaque moteur à moins d'effort à fournir. Ou on peut voir ça dans l'autre sens pour un effort fixe, dans un core XY on pourra potentiellement fournir des accélération plus grande au chariot comparativement à une mécanique cartésienne.
Les problèmes liés à un core XY sont plutôt à chercher au niveau de la conception qui est bien moins simple que la méthode cartésienne. Voici un schéma d'un core XY :

Le chariot de la machine se trouvera à l'endroit où les courroies rouges et vertes se rejoignent. Hormis les deux poulies légèrement surélevées pour permettre le croisement des courroies, toutes les autres doivent être parfaitement alignées sous peine de voir apparaître des couples de forces sur les axes. Il est donc nécessaire d'apporter un soin tout particulier aux pièces qui vont tenir ces poulies.
Choix de l'électronique
Sur ma petite prusa il s'agit d'une simple carte Arduino mega 2560. Elle est simple, fait le taff et pour commencée elle était très bien. Cependant, lorsque j'ai commencé à faire de la gravure LASER, j'ai pu remarqué que dans certains cas, j'atteignais les limites de la carte ... Impossible d'aller plus vite ... Après quelques recherches et comparatifs, j'ai décidé de me tourner vers cette carte :
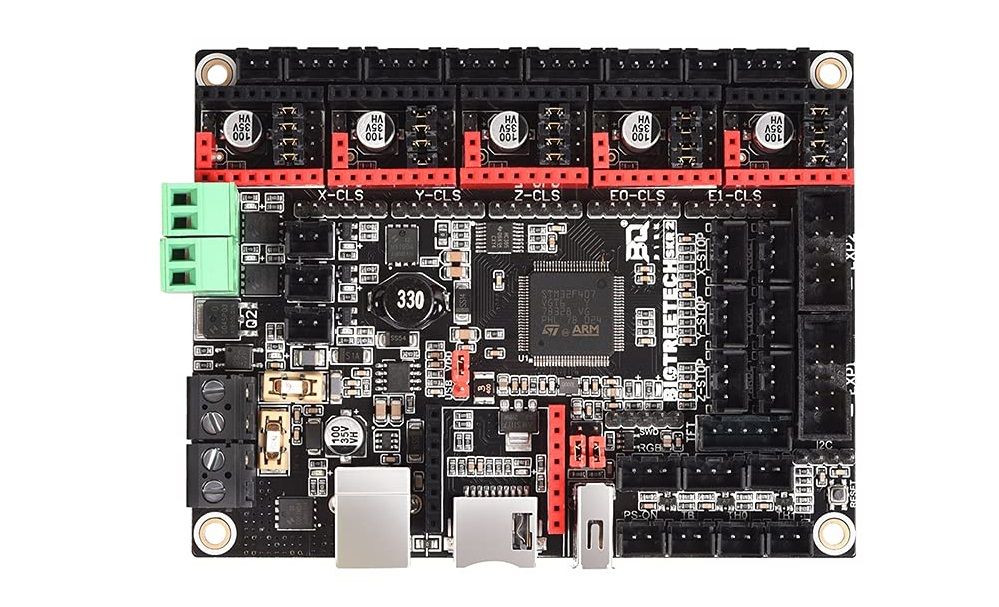
Déjà parce qu'on trouve facilement la documentation et les sources, mais également car elle est cadencée à 168MHz, c'est à dire bien plus qu'une carte Arduino !! Je ne devrais donc plus avoir de problème lié à la vitesse lorsque je fais une gravure.
Voilà pour les grandes lignes, maintenant commence un travail de modélisation de toutes les pièces qui me permettront de tenir les poulies, les moteurs, le chariot etc ... Mais ça sera pour un prochain article.